
Управление механизмами - контактное (при помощи пускателей серии ПМЛ или ПМА) или бесконтактное (при помощи пускателя бесконтактного реверсивного ПБР-3А, ПБР-2М).
Механизмы МЭМ оснащаются одним из видов блока сигнализации положения выходного вала:
- индуктивный БСПИ (обозначение - И) - выходной сигнал в виде изменения взаимоиндуктивности) 0-10 мГН;
- реостатный БСПР (обозначение - Р) выходной сигнал в виде изменения активного сопротивления 0-120 Ом;
- токовый БСПТ (обозначение - У) - выходной унифицированный сигнал 0-5, 0-20, 4-20 мА;
- блок концевых выключателей БКВ без датчика положения выходного вала.
- механизмы, комплектуемые токовыми датчиками, выпускаются с выносными и встроенными блоками питания;
- выносным токовым преобразователем БПИ-30.
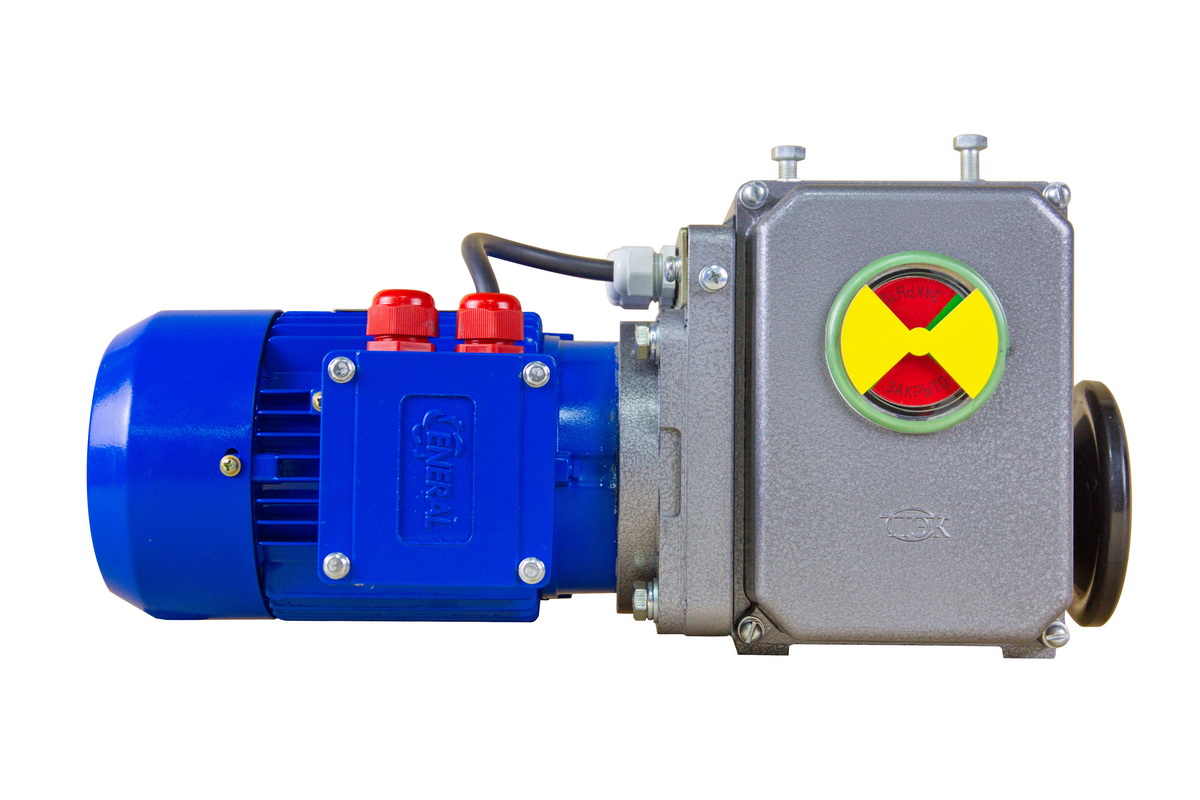
Управление приводами происходит в соответствии с командными сигналами управляющих устройств. Отключение двигателя происходит при достижении крайних положений запорной арматуры или при достижении заданного крутящего момента.
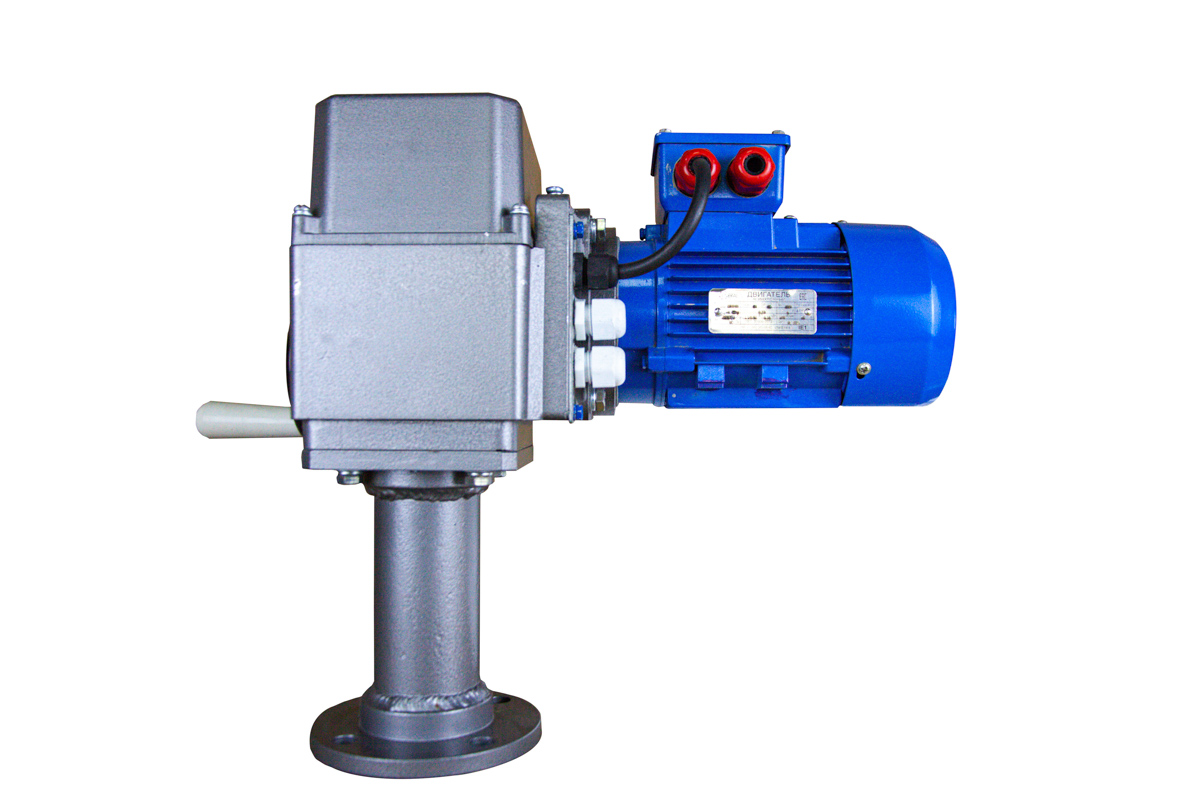
Многооборотный привод ПЭМ даёт возможность дистанционно или локально регулировать работу трубопроводов, элементы которых имеют различные характеристики и конструктивные особенности.
Функциональные возможности приводов ПЭМ:
- Дистанционное или ручное открытие и закрытие арматуры
- Дистанционная остановка арматуры в любом промежуточном положении
- Указание степени открытия (закрытия) арматуры на шкале местного указателя
- Выдача сигнала на отключение двигателя при достижении запорным устройством арматуры крайних положений; при достижении заданного крутящего момента на выходном валу привода или при заедании подвижных частей арматуры
- Настройка и регулировка величины крутящего момента